Researchers from the Laboratoire des Solides Irradiés – LSI (UMR CEA, CNRS, Ecole Polytechnique) and Sorbonne Université, as part of an international collaboration, have developed a 4D printing approach to fabricate magneto-plasmonic microrobots capable of navigating under magnetic field actuation and generating localized heating upon near-infrared illumination. This work introduces a new strategy for programmable de-icing – spatially targeted and triggered on demand – opening new avenues for thermal management in extreme environments.
Ice accretion represents a major technological challenge across many industrial sectors: it can reduce wind turbine power output by up to 80%, delay air traffic, and threaten the safety of polar navigation. Existing solutions, such as resistive heating, chemical de-icing agents, and mechanical scraping, remain poorly selective, as they treat entire surfaces uniformly without specifically targeting iced regions.
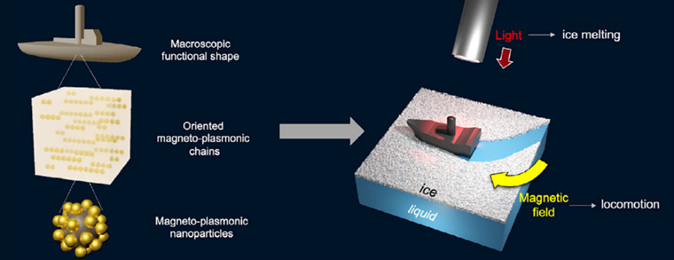
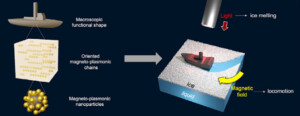
Figure : Le dispositif imprimé en 4D présente une forme fonctionnelle macroscopique (ici, un brise-glace) et des charges magnéto-plasmoniques alignées en chaînes. Le champ magnétique assure la locomotion (positionnement spatial) tandis que l’illumination lumineuse permet un déclenchement thermique (contrôle temporel de la vitesse de fusion).
As part of an international collaboration involving LSI, Sorbonne Université and several European partners, a 4D printing process was developed to fabricate multifunctional magneto-plasmonic microrobots. This process is based on the synthesis of raspberry-like nanostructures, consisting of a magnetite core (~75 nm) coated with gold nanoparticles (~18 nm), which self-assemble into aligned chains during digital light processing (DLP) photopolymerization.
During digital light processing (DLP) photopolymerization, these nanofillers self-assemble within the photosensitive resin into aligned chains under the influence of a magnetic field generated by a Halbach array integrated into the printer (CEA patent). This architecture endows the printed object with two coupled yet independently controllable functionalities: magnetically driven autonomous navigation (with independently controlled rotation and translation) and localized heating under near-infrared illumination (852 nm), with a photothermal conversion efficiency of ~40% and surface temperatures exceeding 80 °C.
As a proof of concept, the teams fabricated a 4D-printed miniature icebreaker placed on a thin ice layer at −5 °C. Under infrared illumination, the device melted the ice beneath its hull in less than 5 minutes and subsequently carved a channel within 12 minutes, guided by a permanent magnet with millimeter-scale precision. The photothermal performance remains fully preserved after thermal cycling down to −20 °C.
This platform represents a significant advance in multifunctional additive manufacturing. It demonstrates, for the first time, the integration of coupled magneto-plasmonic stimuli within a single 4D-printed object, without any wired connection. Unlike conventional approaches, this system selectively targets iced regions with programmable spatial and temporal precision, opening promising avenues for soft robotics in extreme environments and adaptive thermal management.
Reference
« 4D-Printed Magneto-Plasmonic Microrobots for Programmable Spatiotemporal De-Icing. », Advanced Functional Materials, 2026.
Collaboration
- Laboratoire de Chimie de la Matière Condensée de Paris (LCMCP), Paris, France.
- Department of Applied Science and Technology (DISAT), Politecnico di Torino, Torino, Italie.
- Laboratoire de Physicochimie des Electrolytes et Nanosystèmes interfaciaux PHENIX, Paris, France.
- Institut d’études avancées de l’université de Strasbourg (USIAS), Strasbourg, France.
- Direction des Applications Militaires, Le Ripault, Monts, France.
- Institut Universitaire de France (IUF), Paris, France.
Contact
- Giancarlo Rizza, CEA Research Director at LSI.